
«Умным роботом» назвали свое изобретение учащиеся девятого класса из села Мумра Астраханской области. Как сообщили ИА «Высота 102» в региональном министерстве образования, машина выполняет три функции: гуляет с домашним животным, перемещается по его следу, собирает и вывозит мусор.
По словам изобретателей Ивана Шашечкина, Веры Овчинниковой и Никиты Аксенова за каждое действие робота отвечают отдельные датчики. Всего их три – датчик расстояния, звука и освещённости и программы. Школьники запрограммировали робота так, чтобы он был способен перемещаться, поворачиваться и захватывать предметы. Датчик расстояния помогает изобретению обнаружить предмет, а механическая «рука» – захватывает его. Датчик звука отвечает за то, чтобы робот смог выполнять свою функцию по команде (ей может служить хлопок в ладоши или какой-нибудь другой звук), а датчик освещённости отвечает за функцию «Робот идёт по следу собаки», то есть машина распознаёт след и двигается по нему.
Как отметили создатели, их главная задача – сделать робота помощником человека. Своё изобретение юные учёные представили на научной конференции в региональном школьном технопарке.
По словам изобретателей Ивана Шашечкина, Веры Овчинниковой и Никиты Аксенова за каждое действие робота отвечают отдельные датчики. Всего их три – датчик расстояния, звука и освещённости и программы. Школьники запрограммировали робота так, чтобы он был способен перемещаться, поворачиваться и захватывать предметы. Датчик расстояния помогает изобретению обнаружить предмет, а механическая «рука» – захватывает его. Датчик звука отвечает за то, чтобы робот смог выполнять свою функцию по команде (ей может служить хлопок в ладоши или какой-нибудь другой звук), а датчик освещённости отвечает за функцию «Робот идёт по следу собаки», то есть машина распознаёт след и двигается по нему.
Как отметили создатели, их главная задача – сделать робота помощником человека. Своё изобретение юные учёные представили на научной конференции в региональном школьном технопарке.


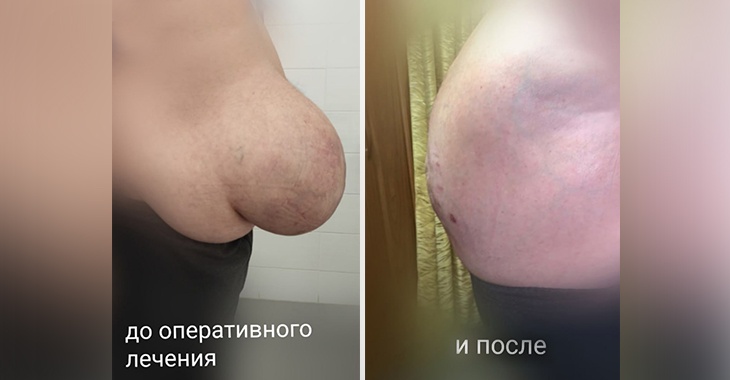 Врачи волжской больницы имени Фишера успешно прооперировали 65-летнего жителя Воронежа, который страдал от растущей не по дням, а по часам грыжи. Как рассказали V102.RU в комитете здравоохранения Волгоградской области, обратившийся...
Врачи волжской больницы имени Фишера успешно прооперировали 65-летнего жителя Воронежа, который страдал от растущей не по дням, а по часам грыжи. Как рассказали V102.RU в комитете здравоохранения Волгоградской области, обратившийся... Три высших учебных заведения Волгограда стали федеральными инновационными площадками. Как сообщает ИА «Высота 102» со ссылкой на приказ Министерства науки и высшего образования, такой статус получили ВГАФК, ВолГУ и ВолгГМУ.
...
Три высших учебных заведения Волгограда стали федеральными инновационными площадками. Как сообщает ИА «Высота 102» со ссылкой на приказ Министерства науки и высшего образования, такой статус получили ВГАФК, ВолГУ и ВолгГМУ.
... В День российской науки, 8 февраля, ИА «Высота 102» запускает научно-просветительский проект «Двигатель прогресса». Ведущие вузы Волгоградской области, исследовательские центры и промышленные предприятия региона расскажут о своих инновационных разработках и...
В День российской науки, 8 февраля, ИА «Высота 102» запускает научно-просветительский проект «Двигатель прогресса». Ведущие вузы Волгоградской области, исследовательские центры и промышленные предприятия региона расскажут о своих инновационных разработках и... Министр науки и высшего образования РФ Михаил Котюков стал личным наставником волгоградского ученого Максима Щербакова, одного из победителей всероссийского конкурса "Лидеры России". Об этом ИА "Высота 102" рассказал сам ученый....
Министр науки и высшего образования РФ Михаил Котюков стал личным наставником волгоградского ученого Максима Щербакова, одного из победителей всероссийского конкурса "Лидеры России". Об этом ИА "Высота 102" рассказал сам ученый.... Первые 10 студентов Волгоградского государственного технического университета (ВолгГТУ) из числа магистров и бакалавров приступили к обучению на базовой кафедре «Технология органического и нефтехимического синтеза», которая начала работать на промышленной площадке...
Первые 10 студентов Волгоградского государственного технического университета (ВолгГТУ) из числа магистров и бакалавров приступили к обучению на базовой кафедре «Технология органического и нефтехимического синтеза», которая начала работать на промышленной площадке... Государственная комиссия подписала акт сдачи-приемки центра инновационных лекарственных отечественных препаратов в Волгограде. Об этом сообщил ИА «Высота 102» ректор Волгоградского государственного медицинского университета, главный внештатный специалист-клинический фармаколог Минздрава РФ, академик...
Государственная комиссия подписала акт сдачи-приемки центра инновационных лекарственных отечественных препаратов в Волгограде. Об этом сообщил ИА «Высота 102» ректор Волгоградского государственного медицинского университета, главный внештатный специалист-клинический фармаколог Минздрава РФ, академик... По сложившейся традиции в преддверии новогодних праздников 20 декабря 2017 года были вручены государственные и правительственные награды госслужащим, работникам предприятий, ученым, представителям сферы образования. Всего в списке награжденных 48 человек....
По сложившейся традиции в преддверии новогодних праздников 20 декабря 2017 года были вручены государственные и правительственные награды госслужащим, работникам предприятий, ученым, представителям сферы образования. Всего в списке награжденных 48 человек.... Волгоградский опорный государственный технический университет занял 1-е место и взял гран-при среди ведущих вузов России на всероссийском фестивале ВУЗПРОМФЕСТ в Москве. Как сообщили ИА «Высота 102» в пресс-службе высшего учебного...
Волгоградский опорный государственный технический университет занял 1-е место и взял гран-при среди ведущих вузов России на всероссийском фестивале ВУЗПРОМФЕСТ в Москве. Как сообщили ИА «Высота 102» в пресс-службе высшего учебного... Крупное научно-популярное событие – РУСАЛ ФестивAL#Наука пройдет в Волгограде с 6 по 9 декабря. Как сообщили ИА «Высота 102» в пресс-службе РУСАЛа, в рамках фестиваля пройдет экскурсия для школьников на...
Крупное научно-популярное событие – РУСАЛ ФестивAL#Наука пройдет в Волгограде с 6 по 9 декабря. Как сообщили ИА «Высота 102» в пресс-службе РУСАЛа, в рамках фестиваля пройдет экскурсия для школьников на... Определены лауреаты премий Волгоградской области в сфере науки и техники за 2017 год. Как сообщает ИА «Высота 102» со ссылкой на постановление, подписанное в администрации Волгоградской области, среди лауреатов –...
Определены лауреаты премий Волгоградской области в сфере науки и техники за 2017 год. Как сообщает ИА «Высота 102» со ссылкой на постановление, подписанное в администрации Волгоградской области, среди лауреатов –... Полтора миллиона рублей разделили между собой десять победителей конкурса инновационных технологических проектов, который состоялся в рамках «Стартап-школы», организованной ВолгГТУ при поддержке Волгоградского областного бизнес-инкубатора, сообщает корреспондент ИА «Высота 102».
...
Полтора миллиона рублей разделили между собой десять победителей конкурса инновационных технологических проектов, который состоялся в рамках «Стартап-школы», организованной ВолгГТУ при поддержке Волгоградского областного бизнес-инкубатора, сообщает корреспондент ИА «Высота 102».
... Одним из первых в ЮФО детский технопарк «Кванториум» появится в Волгограде в будущем году, местом прописки которого станет региональный опорный техуниверситет. На создание детского технопарка волгоградский регион в 2018 году...
Одним из первых в ЮФО детский технопарк «Кванториум» появится в Волгограде в будущем году, местом прописки которого станет региональный опорный техуниверситет. На создание детского технопарка волгоградский регион в 2018 году... В ходе сегодняшнего визита в Волгоград заместитель министра образования Людмила Огородова посетила Волгоградский государственный технический университет. Как стало известно корреспонденту ИА «Высота 102», в вузе замминистра провела полтора часа. За...
В ходе сегодняшнего визита в Волгоград заместитель министра образования Людмила Огородова посетила Волгоградский государственный технический университет. Как стало известно корреспонденту ИА «Высота 102», в вузе замминистра провела полтора часа. За... Преподаватель кафедры английской филологии Волгоградского государственного университета Елена Малушко стала победителем Всероссийского форума молодых ученых и получила путевку на XIX Всемирный фестиваль молодежи и студентов в Сочи.
Как сообщила ИА...
Преподаватель кафедры английской филологии Волгоградского государственного университета Елена Малушко стала победителем Всероссийского форума молодых ученых и получила путевку на XIX Всемирный фестиваль молодежи и студентов в Сочи.
Как сообщила ИА...